Jetson Nano
本文主要用于记录,基于Jetson Nano开发板上应用于无人驾驶小车的系统开发流程,主要包括镜像制作、环境配置、硬件驱动等。
1. 镜像制作
-
镜像下载
重点提醒:JetsonNano处理器架构是aarch64架构,所以在jetson nano上安装软件时请选择arrch64版本的,否则会导致无法预料的严重后果。 arm64和aarch64之间的区别:arm64已经与aarch64合并,因为aarch64和arm64指的是同一件事。ARM64是由Apple创建的,而AARCH64是由其他人(最著名的是GNU / GCC的)创建的。用于aarch64的Apple后端称为arm64,而LLVM 编译器社区开发的后端称为aarch64(因为它是64位ISA的规范名称),后来将arm64和 aarch64 两者合并,现在的后端称为aarch64。-
镜像文件
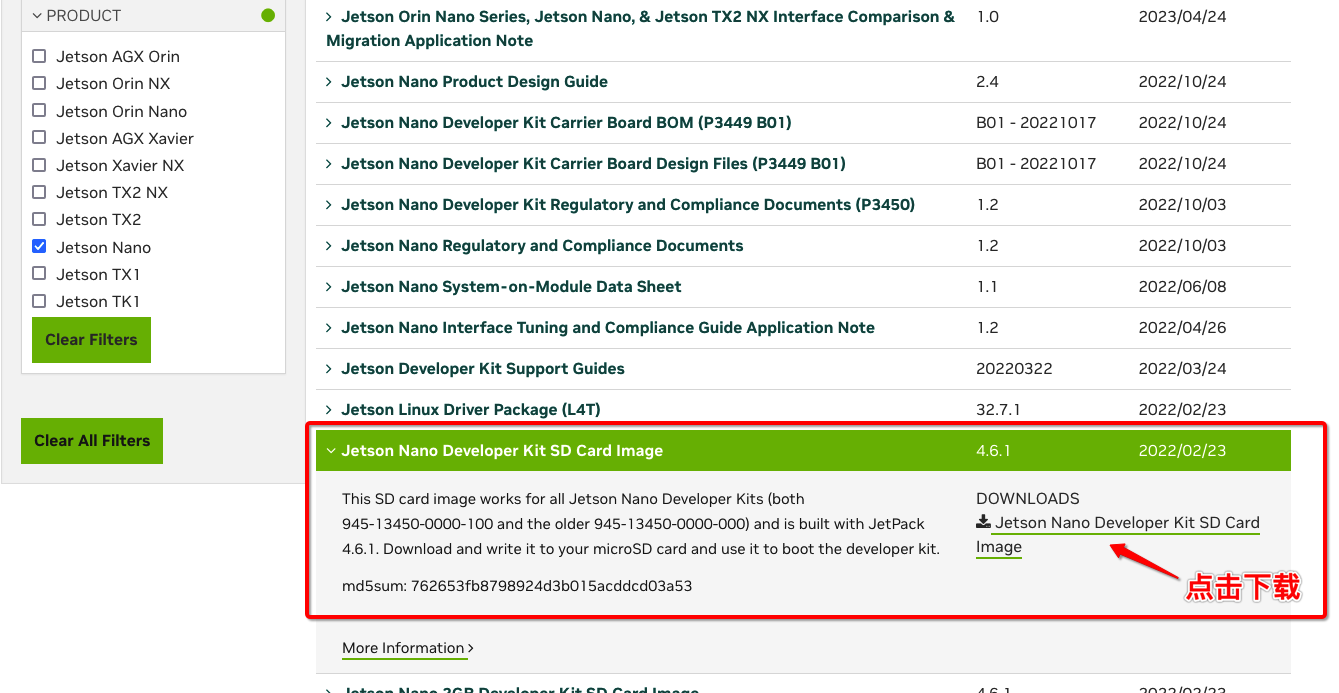
下载完成后本地会保存为后缀为.zip的文件
-
-
格式化SD卡
初始化一张大于32GB的SD卡,并对其进行格式化,格式可以为exFAT -
镜像烧录
文章以Mac OS系统为例进行镜像的烧录,下载树莓派镜像烧录软件,软件安装完成后,操作系统选项里点击使用自定义镜像并选择已下载的镜像文件,SD卡选项选择要进行烧录的SD卡即可,设置完成后点击烧录按钮镜像的烧录,等待完成即可。

2. 环境配置
-
修改环境变量
Jetson Nano利用官方镜像进行安装后,系统已经安装好了JetPack,cuda,cudaa,OpenCV等组件,需要修改下环境变量才可以使用。
利用gedit打开 ~ 路径下.bashrc文件:
sudo gedit ~./bashrc文件的最后添加以下三行:
export PATH=/usr/local/cuda-10.2/bin:$PATH export LD_LIBRARY_PATH=/usr/local/cuda/lib64:$LD_LIBRARY_PATH export CUDA_HOME=$CUDA_HOME:/usr/local/cuda-10.2重新执行.bashrc文件,直接生效;
source ~./bashrc
输入nvcc -V命令进行测试,如果显示如下信息,证明修改正确。
nvcc -V nvcc: NVIDIA (R) Cuda compiler driver Copyright (c) 2005-2019 NVIDIA Corporation Built on Wed_Oct_23_21:14:42_PDT_2019 Cuda compilation tools, release 10.2, V10.2.89 -
更换国内镜像源
NVIDIA官方提供的Linux镜像版本为Ubuntu 18.04 LTS,镜像默认的是Ubuntu官方源,在国内使用该源下载程序时速度较慢,所以需要更换。
首先,打开/etc/apt/sources.list文件,注释原内容
sudo gedit /etc/apt/sources.list在末尾添加下述内容(以清华大学镜像源为例,注意镜像源需要支持arm64架构)
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释 deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main restricted universe multiverse # 预发布软件源,不建议启用 # deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-proposed main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-proposed main restricted universe multiverse保存并关闭文件,然后输入以下命令来更新源:
sudo apt-get update其它部分常用镜像源:
中科大镜像源:
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释 deb http://mirrors.ustc.edu.cn/ubuntu-ports bionic main restricted universe multiverse # deb-src http://mirrors.ustc.edu.cn/ubuntu-ports bionic main restricted universe multiverse deb http://mirrors.ustc.edu.cn/ubuntu-ports bionic-updates main restricted universe multiverse # deb-src http://mirrors.ustc.edu.cn/ubuntu-ports bionic-updates main restricted universe multiverse deb http://mirrors.ustc.edu.cn/ubuntu-ports bionic-backports main restricted universe multiverse # deb-src http://mirrors.ustc.edu.cn/ubuntu-ports bionic-backports main restricted universe multiverse deb http://mirrors.ustc.edu.cn/ubuntu-ports bionic-security main restricted universe multiverse # deb-src http://mirrors.ustc.edu.cn/ubuntu-ports bionic-security main restricted universe multiverse # 预发布软件源,不建议启用 # deb http://mirrors.ustc.edu.cn/ubuntu-ports bionic-proposed main restricted universe multiverse # deb-src http://mirrors.ustc.edu.cn/ubuntu-ports bionic-proposed main restricted universe multiverse阿里源:
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释 deb https://mirrors.aliyun.com/ubuntu-ports/ bionic main restricted universe multiverse # deb-src https://mirrors.aliyun.com/ubuntu-ports/ bionic main restricted universe multiverse deb https://mirrors.aliyun.com/ubuntu-ports/ bionic-updates main restricted universe multiverse # deb-src https://mirrors.aliyun.com/ubuntu-ports/ bionic-updates main restricted universe multiverse deb https://mirrors.aliyun.com/ubuntu-ports/ bionic-backports main restricted universe multiverse # deb-src https://mirrors.aliyun.com/ubuntu-ports/s bionic-backports main restricted universe multiverse deb https://mirrors.aliyun.com/ubuntu-ports/ bionic-security main restricted universe multiverse # deb-src https://mirrors.aliyun.com/ubuntu-ports/ bionic-security main restricted universe multiverse # 预发布软件源,不建议启用 # deb https://mirrors.aliyun.com/ubuntu-ports/ bionic-proposed main restricted universe multiverse # deb-src https://mirrors.aliyun.com/ubuntu-ports/ bionic-proposed main restricted universe multiverse
3. pip安装
sudo apt-get install python3-pip python3-dev
更新pip,保证是最新版本
pip3 install --upgrade pip
4. Jtop安装
-
依赖安装
sudo apt-get install git cmake sudo apt-get install python3-dev sudo apt-get install libhdf5-serial-dev hdf5-tools sudo apt-get install libatlas-base-dev gfortran -
安装jtop
sudo -H pip3 install -U jetson-stats
5. 安装Tensorflow
-
安装依赖库
sudo apt install python3-scipy -y sudo apt install python3-pandas -y sudo apt install python3-sklearn -y sudo apt install python3-seaborn -y安装一些其他依赖
sudo apt-get install libhdf5-serial-dev hdf5-tools libhdf5-dev zlib1g-dev zip libjpeg8-dev -
安装numpy
需要先升级 protobuf 版本至 3.3.0:
sudo pip3 install protobuf==3.3.0安装 numpy:
sudo pip3 install -U numpy==1.16.1注意这里numpy的版本,太高或者太低多多少少都会导致一些后面安装的问题,如果不指定版本,默认安装1.19.5版本会导致后面装h5py的时候报非法指令的错误。
-
安装h5py
这个包对依赖的版本要求真的非常高!出了各种各样的问题,最终选择下载源文件手动安装
笔记本在清华的镜像软件源下载h5py==2.10.0(h5py-2.10.0.tar.gz)Links for h5py (tsinghua.edu.cn)
下载完成用U盘拷贝到nano中
在nano里面解压文件,并在对应文件夹中(文件夹可以看到setup.py)打开终端
注意!在安装前先要安装Cython==3.0.0a10!如果有Cython也要保证版本一致!
sudo pip3 install -U Cython==3.0.0a10接着运行setup.py来装h5py,注意这里的python3不能少,否则系统默认是2.7的版本,会找不到Cython
sudo python3 ./setup.py install一段漫长的编译以后,h5py==2.10.0就装好了!
-
安装keras-applications包
sudo pip3 install -U keras-applications -
安装future包
sudo pip3 install -U future -
安装 setuptools 和 testresources 包
sudo pip3 install -U setuptools testresources -
检查相应库的版本
最后检查一遍相应库的版本看是否满足安装 Tensorflow 的条件。
检查相应库的版本:
pip3 list安装 Tensorflow 的条件:
numpy==1.16.1, future==0.17.1, mock==3.0.5, h5py==2.9.0, gast==0.2.2, keras_preprocessing==1.0.5, keras_applications==1.0.8, scipy==1.4.1 -
安装Tensorflow
使用pip3安装TensorFlow,该命令将安装与JetPack 4.4兼容的TensorFlow的最新版本:
sudo pip3 install --pre --extra-index-url https://developer.download.nvidia.com/compute/redist/jp/v461 tensorflow如果速度太慢可以pip暂时换源:(在上面命令后加 -i https://pypi.tuna.tsinghua.edu.cn/simple)
sudo pip3 install --pre --extra-index-url https://developer.download.nvidia.com/compute/redist/jp/v461 tensorflow -i https://pypi.tuna.tsinghua.edu.cn/simple等待一段时间后,Tensorflow就装好啦!!
-
安装Torch
使用pip3安装torch与torchvision
sudo pip3 install torch==1.8.1 sudo pip3 install torchvision==0.9.1
6. 性能设置
除了无桌面模式和swap虚拟内存外,还可以提高功耗和解除硬件限制来提高性能。
-
设置功耗模式: 查询现有模式
sudo nvpmodel -q设定高功率(10W)模式
sudo nvpmodel -m 0设定低功率(5W)模式
sudo nvpmodel -m 1
改变模式之后,可以再执行第一个”查询“指令,看看是否改变
-
解除硬件限制: 以前Jetson系列产品 ${home} 目录下,都会有个 jetson_clocks.sh 脚步,可以用来将性能压榨到最极致,而 Nano 的 {home} 目录找不到了。。。其实 jetson_clock 没有消失,只是藏起来了。您在任何地方,只要执行以下指令就可以解除硬件限制。
sudo jetson_clocks
7. OpenCV
安装比较麻烦,且容易失败,如无必要可继续使用原生opencv
-
卸载原生opencv
sudo apt-get purge libopencv* sudo apt autoremove sudo apt-get update sudo apt-get install -y build-essential pkg-config -
通过opencv本地包进行安装
* pip官网下载opencv-python=4.5.1.48 * 直接下载文件opencv_python-4.5.1.48-cp36-cp36m-manylinux2014_aarch64.whl * 本地安装完成后,安装numpy==1.16.1 -
通过opencv项目编译安装(不推荐)
安装v4l2
sudo apt install v4l-utils```
-
https://github.com/yqlbu/jetson-packages-family#opencv
- 列表中找到opencv并根据提示进行安装
- 其中opencv,opencv_contrib,opencv_extra 可以先下载到home目录下,以避免因网络不稳而无法安装 ```
安装脚本:
#!/bin/bash # License: MIT. See license file in root directory # Copyright(c) JetsonHacks (2017-2019) # Modifier(c) Kevin Yu (2020) echo -e " +-------------------------------------------------------+ @@@ Welcome to OpenCV4.1-Jetson Installation Toolkit @@@@ | | | Select your Jetson DevKit Model | | | | 1. Jetson-Nano | | 2. Jetson-TX2 | | 3. Jetson-Xavier | | | +-------------------------------------------------------+ " param (){ read -p '[BASH] Put your Jetson model # here: ' NUM if [ "$NUM" == '1' ] || [ "$NUM" == '2' ] || [ "$NUM" == '3' ] then echo -e "[BASH] You choose #$NUM." read -p '[BASH] Do you wish to continue? (y/n) ' VAL #if y continue, else done if [ "$VAL" == "y" ] then echo -e "[BASH] Installation will start in 3 seconds." sleep 3 # Jetson Nano if [ "$NUM" == '1' ]; then ARCH_BIN=5.3 # Jetson TX2 elif [ "$NUM" == '2' ]; then ARCH_BIN=6.2 # Jetson AGX Xaviers elif [ "$NUM" == '3' ]; then ARCH_BIN=7.2 fi start else echo "[BASH] Installation ends..." fi else echo "[BASH] Please put the right # " param fi } start (){ DOWNLOAD_OPENCV_EXTRAS=YES WHEREAMI=$PWD NUM_JOBS=$(nproc) CLEANUP=true PACKAGE_OPENCV="-D CPACK_BINARY_DEB=ON" CMAKE_INSTALL_PREFIX=$INSTALL_DIR echo "[BASH] Installation start!" sleep 2 # Print out the current configuration echo "[BASH] Build configuration: " echo " NVIDIA Jetson Nano" echo " OpenCV binaries will be installed in: $CMAKE_INSTALL_PREFIX" echo " OpenCV Source will be installed in: $OPENCV_SOURCE_DIR" if [ "$PACKAGE_OPENCV" = "" ] ; then echo " NOT Packaging OpenCV" else echo " Packaging OpenCV" fi if [ $DOWNLOAD_OPENCV_EXTRAS == "YES" ] ; then echo "[BASH] Also downloading opencv_extras" fi # Repository setup sudo apt-add-repository universe sudo apt-get update # Download dependencies for the desired configuration cd $WHEREAMI echo "[BASH] Install dependencies ..." sleep 2 sudo apt-get install -y \ build-essential \ cmake \ libavcodec-dev \ libavformat-dev \ libavutil-dev \ libeigen3-dev \ libglew-dev \ libgtk2.0-dev \ libgtk-3-dev \ libjpeg-dev \ libpng-dev \ libpostproc-dev \ libswscale-dev \ libtbb-dev \ libtiff5-dev \ libv4l-dev \ libxvidcore-dev \ libx264-dev \ qt5-default \ zlib1g-dev \ libwebp-dev \ pkg-config # We will be supporting OpenGL, we need a little magic to help # https://devtalk.nvidia.com/default/topic/1007290/jetson-tx2/building-opencv-with-opengl-support-/post/5141945/#5141945 cd /usr/local/cuda/include sudo patch -N cuda_gl_interop.h $WHEREAMI'/patches/OpenGLHeader.patch' # Python 2.7 sudo apt-get install -y python-dev python-numpy python-py python-pytest # Python 3.6 sudo apt-get install -y python3-dev python3-numpy python3-py python3-pytest # GStreamer support sudo apt-get install -y libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev echo "[BASH] Download sources ..." sleep 2 cd $OPENCV_SOURCE_DIR # git clone --branch "$OPENCV_VERSION" https://github.com/opencv/opencv.git # git clone --branch "$OPENCV_VERSION" https://github.com/opencv/opencv_contrib.git if [ $DOWNLOAD_OPENCV_EXTRAS == "YES" ] ; then echo "[BASH] Installing opencv_extras" # This is for the test data cd $OPENCV_SOURCE_DIR # git clone https://github.com/opencv/opencv_extra.git cd opencv_extra git checkout -b v${OPENCV_VERSION} ${OPENCV_VERSION} fi # Patch the Eigen library issue ... cd $OPENCV_SOURCE_DIR/opencv sed -i 's/include <Eigen\/Core>/include <eigen3\/Eigen\/Core>/g' modules/core/include/opencv2/core/private.hpp # Create the build directory and start cmake cd $OPENCV_SOURCE_DIR/opencv mkdir build cd build echo "[BASH] Build from sources ..." sleep 2 echo $PWD time cmake -D CMAKE_BUILD_TYPE=RELEASE \ -D CMAKE_INSTALL_PREFIX=${CMAKE_INSTALL_PREFIX} \ -D WITH_CUDA=ON \ -D CUDA_ARCH_BIN=${ARCH_BIN} \ -D CUDA_ARCH_PTX="" \ -D ENABLE_FAST_MATH=ON \ -D CUDA_FAST_MATH=ON \ -D WITH_CUBLAS=ON \ -D WITH_LIBV4L=ON \ -D WITH_V4L=ON \ -D WITH_GSTREAMER=ON \ -D WITH_GSTREAMER_0_10=OFF \ -D OPENCV_DNN_CUDA=ON \ -D WITH_QT=ON \ -D WITH_TBB=ON \ -D BUILD_opencv_python2=ON \ -D BUILD_opencv_python3=ON \ -D BUILD_TESTS=OFF \ -D BUILD_PERF_TESTS=OFF \ -D OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib/modules \ $"PACKAGE_OPENCV" \ ../ if [ $? -eq 0 ] ; then echo "[BASH] CMake configuration make successful" else # Try to make again echo "[BASH] CMake issues " >&2 echo "[BASH] Please check the configuration being used" exit 1 fi # Consider the MAXN performance mode if using a barrel jack on the Nano time make -j$NUM_JOBS if [ $? -eq 0 ] ; then echo "[BASH] OpenCV make successful" else # Try to make again; Sometimes there are issues with the build # because of lack of resources or concurrency issues echo "[BASH] Make did not build " >&2 echo "[BASH] Retrying ... " # Single thread this time make if [ $? -eq 0 ] ; then echo "[BASH] OpenCV make successful" else # Try to make again echo "[BASH] Make did not successfully build" >&2 echo "[BASH] Please fix issues and retry build" exit 1 fi fi echo "[BASH] Installing ... " sudo make install sudo ldconfig if [ $? -eq 0 ] ; then echo "[BASH] OpenCV installed in: $CMAKE_INSTALL_PREFIX" else echo "[BASH] There was an issue with the final installation" exit 1 fi # If PACKAGE_OPENCV is on, pack 'er up and get ready to go! # We should still be in the build directory ... if [ "$PACKAGE_OPENCV" != "" ] ; then echo "[BASH] Starting Packaging" sudo ldconfig time sudo make package -j$NUM_JOBS if [ $? -eq 0 ] ; then echo "[BASH] OpenCV make package successful" else # Try to make again; Sometimes there are issues with the build # because of lack of resources or concurrency issues echo "[BASH] Make package did not build " >&2 echo "[BASH] Retrying ... " # Single thread this time sudo make package if [ $? -eq 0 ] ; then echo "[BASH] OpenCV make package successful" else # Try to make again echo "[BASH] Make package did not successfully build" >&2 echo "[BASH] Please fix issues and retry build" exit 1 fi fi fi # Install Python packages sudo apt-get install -y libopencv-dev sudo apt-get install -y libopencv-core-dev # check installation IMPORT_CHECK="$(python3 -c "import cv2 ; print(cv2.__version__)")" if [[ $IMPORT_CHECK != *$OPENCV_VERSION* ]]; then echo "[BASH] There was an error loading OpenCV in the Python sanity test." echo "[BASH] The loaded version does not match the version built here." echo "[BASH] Please check the installation." echo "[BASH] The first check should be the PYTHONPATH environment variable." fi echo "[BASH] Installation completed ..." sleep 2 } # Execute ARCH_BIN=0 INSTALL_DIR=/usr/local OPENCV_SOURCE_DIR=$HOME OPENCV_VERSION=4.1.1 param参考:https://blog.csdn.net/qq_68080661/article/details/132057624
常见问题
-
Illegal instruction (core dumped)
-
终端运行
sudo vim ~/.bashrc -
末尾添加环境变量,保存并关闭文件
export OPENBLAS_CORETYPE=ARMV8 -
终端运行
source ~/.bashrc
-
-
Cannot identify device ‘/dev/video…
* pip官网下载opencv-python=4.5.1.48 * 直接下载文件opencv_python-4.5.1.48-cp36-cp36m-manylinux2014_aarch64.whl * 本地安装完成后,安装numpy==1.16.1https://blog.csdn.net/qq_56548850/article/details/123967404
https://blog.csdn.net/weixin_45235219/article/details/128840418