基于Linux系统下的奥比中光Genmini安装与调用
* Ubuntu 20.04
* python 3.7.13
* openni 2.3.0
* open3d 0.15.2
* primesense 2.2.0.30.post5
* 奥比中光 gemini
* Driver OpenNI_2.3.0.85_linux
-
依赖库
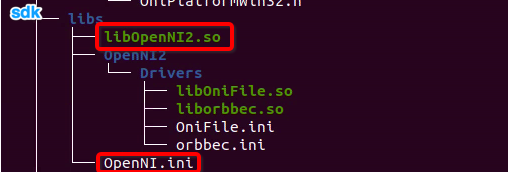
从第三方驱动网站下载OpenNI,解压后OpenNI2以及sdk中的libOpenNI2.so和OpenNI.ini复制到项目根目录
-
深度摄像头的调用
import time from primesense import openni2 import numpy as np import cv2 DEPTH_WIDTH = 640 DEPTH_HEIGHT = 480 # Depth Camera class DepthCameraProcessor(object): def __init__(self, dll_dir, log, intermediate_processor): try: # Initial openni log.logger.info('[ A0000 ] - Initial Openni...') openni2.initialize(dll_directories=dll_dir) # Open Device log.logger.info('[ A0001 ] - Open Depth Device...') depth_dev = openni2.Device.open_any() log.logger.info('[ A0002 ] - Depth Camera Device Information: {}'.format(depth_dev.get_device_info())) # Depth Stream self.depth_stream = depth_dev.create_depth_stream() self.depth_stream.start() except Exception as error: error_msg = '[ A0003 ] - Depth Camera Device Initial Error: {}'.format(error) log.logger.error(error_msg) intermediate_processor.set_value_to_conifg(config_sub_key='depth_camera_state', config_sub_value=False, config_key_first='driver') else: log.logger.info('[ A0005 ] - Depth Camera Initial Success') intermediate_processor.set_value_to_conifg(config_sub_key='depth_camera_state', config_sub_value=True, config_key_first='driver') self.log = log def depth2mi(self, depthValue): return depthValue * 0.001 def depth2xyz(self, u, v, depthValue): fx = 577.54679 fy = 578.63325 cx = 310.24326 cy = 253.65539 # depth = depth2mi(depthValue) depth = depthValue * 0.001 z = float(depth) x = float((u - cx) * z) / fx y = float((v - cy) * z) / fy result = [x, y, z] return result # Generate Depth Image def get_depth_image(self, fps=20, image_type='32fc1'): if fps < 200: time.sleep(1/fps) try: depth_frame = self.depth_stream.read_frame() # depth_frame_data = np.array(depth_frame.get_buffer_as_triplet()).reshape([480, 640, 2]) # print('--', np.array(depth_frame.get_buffer_as_uint16()).shape) depth_frame_data = np.array(depth_frame.get_buffer_as_uint16()).reshape([DEPTH_HEIGHT, DEPTH_WIDTH]) # dpt1 = np.asarray(depth_frame_data[:, :, 0], dtype='uint16') # dpt2 = np.asarray(depth_frame_data[:, :, 1], dtype='uint16') # dpt1 = np.asarray(depth_frame_data[:, :, 0], dtype='float32') # dpt2 = np.asarray(depth_frame_data[:, :, 1], dtype='float32') # print('dpt', dpt[300][300]) # print('dpt2', dpt2[300][300]/255) # dpt2 *= 255 # dpt = dpt1 + dpt2 # dpt = dpt[:, ::-1] # img_color = cv2.applyColorMap(cv2.convertScaleAbs(depth_frame_data, alpha=0.05), cv2.COLORMAP_JET) # print('Image: ', img_color[200][300]) except Exception as error: error_msg = '[ A0006 ] - Get Depth Image Error: {}'.format(error) self.log.logger.info(error_msg) return None else: # img_color = img_color.astype('float32') return depth_frame_data if __name__ == '__main__': from config import log, intermediate_processor depth_device_path = './Resource' _depth = DepthCameraProcessor(depth_device_path, log, intermediate_processor) # _depth.get_3d_view() from config import ServerTools tools = ServerTools() while True: st_time = time.time() depth_data = _depth.get_depth_image(200) if not depth_data is None: # cv2.imshow('', depth_data) dis_sum = [] for i in range(20): dis_sum.append(depth_data[230+i, 310+i]) distance_str = '{:.1f}cm'.format((sum(dis_sum)/len(dis_sum))/10) color_image = cv2.applyColorMap(cv2.convertScaleAbs(depth_data, alpha=0.05), cv2.COLORMAP_JET) cv2.putText(color_image, distance_str, (320, 240), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 1) cv2.circle(color_image, (320, 240), 2, (255, 255, 255), 2) # color_image = tools.dataset_image_crop(color_image) cv2.imshow('dis', cv2.convertScaleAbs(depth_data, alpha=0.05)) cv2.imshow('color', color_image) print('FPS: {:.1f}'.format(1/(time.time()-st_time))) if cv2.waitKey(1) == ord('q'): break -
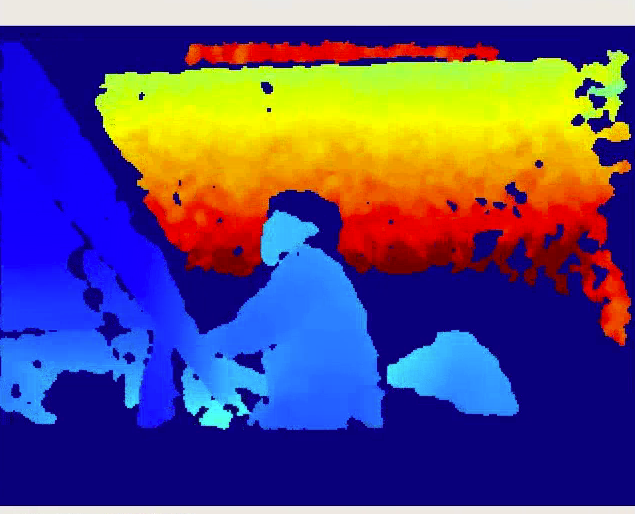
运行效果